Hardware
Design and Construction of prototype robots for Logistics
I am the coordinator of project "Relief", in the context of which, we have designed and constructed prototype robots and a drone for inventorying and accurate 3D localization of products, exploiting UHF RFID technology. Read more at the project's web-page: https://relief.web.auth.gr/language/en/home/
Below you can find a list of photos from this work.


Design and Construction of a prototype social robot for a Museum
I am the coordinator of project "CultureID", in the context of which, we have designed and constructed a prototype social robot that interacts with visitors in the Archaelogical Museum of Thessaloniki, exploiting RFID technology. Read more at the project's web-page: https://cultureid.web.auth.gr/?page_id=216&lang=en


Design and Construction of an Unmanned Energy-Sustainable Underwater Vehicle
Our group at the School of ECE, AUTH, built an Unmanned Underwater Vehicle (UUV) with low-cost electronics. The names of the students that constructed the prototype are: Panagiotis Mylonas and Konstantinos Karmas. See a demo at the following link: Submarine - Video
Design and Construction of Wireless Sensor Networks
In the context of the course "Telecommunication Networks" (8th Semester), undergraduate students were requested to design and construct centralised and distributed wireless sensor networks. This course was conducted for the 1st time during the spring of 2015.
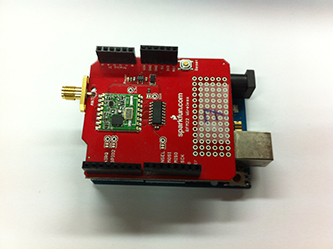
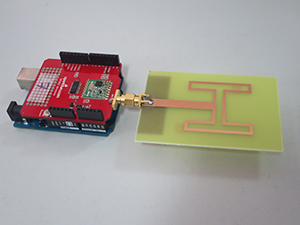
The Node
Each wireless node consists of three parts: the sensor, the microcontroller and the transceiver. More specifically, the "brain" of our node was the Arduino Uno microcontroller board (based on the ATmega328 microcontroller). Our wireless transceiver was the RFM22 shield that uses the re-programmable RFM22 module developed by "HOPERF". A small raster area was used for a simple temperature sensor. In addition, antennas were designed by the students for each node, in the context of the course "Special Antennas" (8th Semester).
Structure of the Course
The students were divided in 4-persons groups. Each group was assigned a different MAC protocol and different scenaria in terms of the topology of the wireless sensor network under the constraints of the protocol). 4 exercises included contention free protocols in the frequency or the time domain with fixed or dynamic assignment of the channel. 6 exercises included contention based protocols (ALOHA, CSMA-CA, MACAW, etc.).All groups should program their nodes so as to be able to: 1. Find each other and form a network when they start. 2. Form new networks as the nodes change locations. 3. Possibly use nodes as relays (if needed). 4. Handle (single frequency) interference at their operating band (they should make sure that communication will be restored after a while at a new frequency).
They were given proper documentation on how to programm their nodes. They were also given example-codes. They were continuously supported by myself. At the end, we held a two-day workshop, where they presented their "realized" network to the other groups. During the presentation, we measured common evaluation criteria, like: 1. Successful throughput 2. Collisions 3. Energy Consumption 4. Delay This allowed for a physical insight into the advantages and disadvantages of each different architecture. Below you can find a list of photos from this work and a sample code in "rar" format.

Construction of Prototype passive UHF RFID tags for Educational Purpose
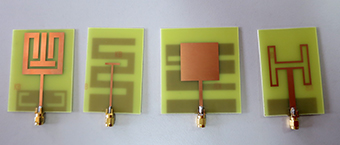
In the context of a prototype course, undergraduate students are requested to design prototype UHF-RFID tag antennas.
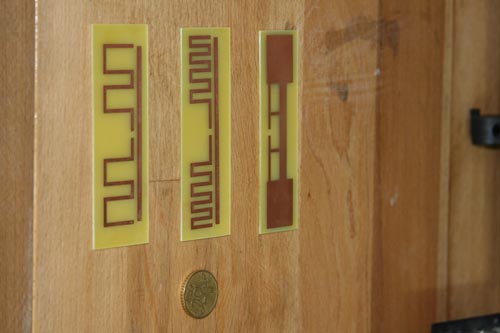
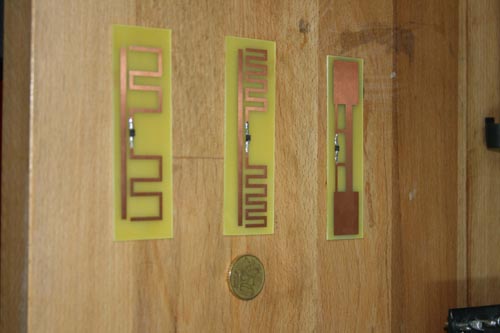
This course was conducted for the 1st time during the spring of 2012. All students are introduced on UHF RFID technology and the specificities of "Backscattering Communications". Additional lectures include wireless power transfer and some basic constraints on passive RFID tag ICs. They should clearly understand the importance of maximizing power transfer for passive RFID tags. As a laboratory exercise, they are requested to design a UHF antenna, within specific size constraints (maximum length 10cm, maximum width 3cm), so that maximum power transfer is accomplished for a specific RFID chip. All students begin their design with a planar dipole and then they start meandering, in order to bring the antenna within the requested size-constraints. Then, each student is requested to conjugate-match his antenna with the available tag IC, by exploiting a specific technique or a combination of techniques: introducing conductive lines in the design that act as shunt or series inductor, shunt capacitance or by proper capacitive tip-loading. As a consequence each student comes-up with his own unique "tuned" design. Then all designs were manufactured chemically (using FR-4 sheets). Alternatively, we could have used a vinyl cutter or generally a cutting machine and copper sheets.
As soon as the antennas were manufactured, they were soldered to the passive RFID chips. The UCODE G2X (TSSOP8 package) chip, manufactured by NXP Semiconductors, was selected because of its 8-leads package, which facilitated manual soldering. The specific chip had a sensitivity (minimum wake-up threshold) equal to -14dBm.
When all RFID tags were manufactured, their performance was evaluated by employing a commercial RFID system. Specifically, the Impinj Speedway 4-port monostatic reader transmitted 30dBm via a 1dB-loss cable connected to a 7dBic (4dBi per polarization axis) circularly polarized antenna manufactured by MTI Wireless (model MT-242032/NRH). The reader's antenna and the tag under test were fixed at the same height and their separating-distance was gradually increased. Successful reading of the tag for increasing distance was recorded for each tag. Impressive performance was recorded for all prototype RFID rags. More specifically: all tags were continuously identified up to approximately 6m. Then, they were "lost" until 7m and then they were identified again up to 8-8.5m! A video demonstrating 7.5m-range is uploaded in the following link. Clearly, as the experiments were conducted in "laboratory" environment, disappearance and reappearance of the tags (at specific distances for all tags) was due to destructive and constructive interference respectively. The achieved impressive (considering the -14dBm sensitivity) range reveals that exceptional power matching was achieved by all prototype designs.
Photos from the manufacturing process and the measurements are given below:






Assembly of an Access Point for Experimental Purpose
A FreeBSD operating system has been installed on the 4GB flash memory, in order to control the 802.11a/b/g card. Then the transceiver has been forced to operate in different modes (e.g. ad-hoc mode in one band and access point in the other etc.). The idea is to experiment with different distributed strategies in terms of resource management and schedulling.


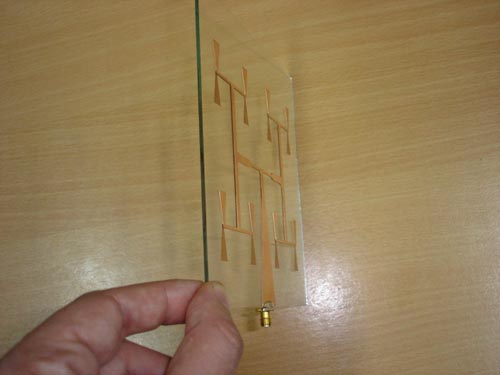
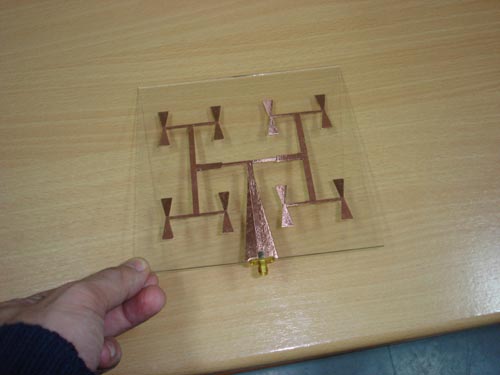
Manufacturing antennas on a glass subtrate
Sample photos from the proccess of manufacturing some low cost antennas on a glass-subtrate. The antennas are designed by Dr Thodoris Vasiliadis and professor Sergiadis. The specific antennas, shown in the figures are installed in the Aristotle University Campus and represent part of the wireless infrustructure of the IEEE 802.11 a/b/g network of the University.